 Introdução: Introdução:
Em 1968, Ivan Sutherland implementou o primeiro Sistema de Realidade
Virtual. Ele já usava na época displays na forma de capaceto.
Nos anos 80, RV ocupou a imaginação do povo e das agências
de pesquisa dos EUA. O potencial das aplicações de RV inclui
arquitetura, simulação, treinamento e entretenimento. Para
o propósito deste artigo, definimos "realidade virtual" com significado
de sistemas que possibilitam ao usuário olhar em todas as direções
e atualizar os pontos de vista do usuário por movimentos da cabeça
do mesmo. As tecnologias para RV incluem os HMD´s e os CAVEs. A Academia
Nacional de Ciências recomenda, através de informações
dadas no VR [NAS] uma lista de procedimentos para determinar quando os
sistemas de RV são melhores que os displays desktops. Neste artigo,
faremos uma quantificação da imersão, através
do senso de "estar aqui" - presença. Nós desafiamos usuários
- ora usando capacetes, ora usando monitores estacionários, para
encontrar um dado alvo fortemente camuflado. Em algumas destas buscas,
há 50/50 chances de que o alvo seja algo na cena. O trabalho do
usuário está definido entre encontrar o alvo ou afirmar que
nenhum alvo está presente. Nossos resultados principais dão
conta de:
1- usuários de RV não encontram alvos camuflados mais rapidamente
que usuários tradicionais;
2- usuários de RV são substancialmente mais rápidos
na conclusão de que não há alvos presentes. Usuários
tradicionais necessitam buscar em porções da cena para concluirem
que não há alvos;
"A partir das conclusões acima, inferimos que usuários de
RV constroem um modelo mental frame-of-reference melhor para o espaço."
Nossas outras conclusões:
3- usuários que praticaram RV primeiro transferem, de forma positiva,
tal experiência e melhoram sua performance quando usam o esquema
de monitores estacionários;
4- usuários que praticaram o modelo estacionário primeiro,
transferem negativamentes esta experiência para ter uma performance
pior quando usam RV. Esta transferência negativa pode ser relevante
em aplicações que usam o processo gráfico 3D em desktop
para treinar usuários para tarefas de mundos reais.
De forma prática, isto demonstra que mundos em RV são valiosos
para construir aplicativos reais que tenham interfaces com RV e apresenta
que usuários melhoram nas tarefas corriqueiras. Isto pode
ser caro e demandar muito tempo. Apresenta-se aqui que melhoras ocorreram
no caso de tarefa corriqueira e discute-se que interface em RV aumenta
a performance do usuário.

Comparando
Interfaces com Realidade Virtual e do tipo Desktop:
Tarefa proposta: encontrar um objeto numa cena, de forma a comparar
o desempenho.
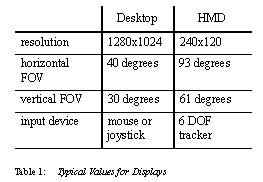
Algumas variáveis são introduzidas, como mostrado na tabela
abaixo:
 A preocupação dos autores não é verificar,
por tendência, se a atual interface RV é usual, mas, se ela
é sempre usual. De forma simples, usuários melhoram de performance
quando controlam o ponto de vista com a cabeça ao invés de
com as mãos.
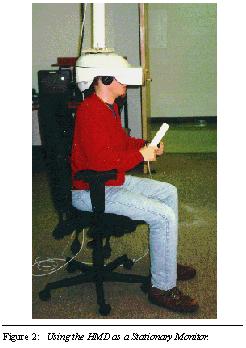
Para tornar algumas variáveis constantes, usamos o capacete
como um display que segue o movimento da cabeça ou como um monitor
estacionário. Em ambos os casos, as cenas foram desenvolvidas em
estéreo. Na figura abaixo, temos o uso na condição
estacionária:
A preocupação dos autores não é verificar,
por tendência, se a atual interface RV é usual, mas, se ela
é sempre usual. De forma simples, usuários melhoram de performance
quando controlam o ponto de vista com a cabeça ao invés de
com as mãos.
Para tornar algumas variáveis constantes, usamos o capacete
como um display que segue o movimento da cabeça ou como um monitor
estacionário. Em ambos os casos, as cenas foram desenvolvidas em
estéreo. Na figura abaixo, temos o uso na condição
estacionária:
 A tarefa escolhida não necessita com relevância da resolução
do monitor, por causa dos tamanhos do alvo e da propriedade de alvos facilmente
visíveis. Usando mouse ou joystick como entrada para o desktop,
podemos introduzir variáveis em atraso e em taxa de amostragem.
Entretanto, é usado o mesmo rastreador de movimento eletromagnético
para o HMD e para a busca de movimentos da mão. O que foi feito:
criou-se uma interface do tipo desktop feita para usuário sentado
numa caderia e tomou-se um rastreador de movimentos nas mãos do
usuário, com leis graus de liberdade. Para tornar ainda outras variáveis
constantes, nós podemos afirmar que os resultados são dependentes
das entradas pelo movimento da cabeça ou das mãos. Componentes
essenciais da configuração para usuários de desktop:
monitor estacionário e equipamento de entrada baseado em movimento
das mãos.
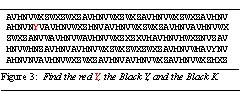
A experiência piloto - Pausch, 1993 - é aquela em que 28 usuários
procuram, de forma fácil, não camuflados, alvos de localizações
imprevisíveis numa sala virtual. Usuário de RV foram 42%
mais rápidos que usuários de desktop. Para encontrar, por
exemplo, o Y na figura
abaixo, que é uma tarefa de pré-atenção, independente
da camuflagem. Numa sala que envolve o usuário, o tempo de encontrar
o Y é
determinado apenas pela rapidez que posso mover a câmera. Mas, para
a mesma figura, o tempo de encontrar o K preto é uma tarefa relacionada
com tarefa mentalmente limitada, mesmo porque não existe o K. "Afirmamos
que os usuários de RV são muito melhores nas buscas sistemáticas
porque têm lembranças melhores daquilo que olharam na cena
que os envolve.
A tarefa escolhida não necessita com relevância da resolução
do monitor, por causa dos tamanhos do alvo e da propriedade de alvos facilmente
visíveis. Usando mouse ou joystick como entrada para o desktop,
podemos introduzir variáveis em atraso e em taxa de amostragem.
Entretanto, é usado o mesmo rastreador de movimento eletromagnético
para o HMD e para a busca de movimentos da mão. O que foi feito:
criou-se uma interface do tipo desktop feita para usuário sentado
numa caderia e tomou-se um rastreador de movimentos nas mãos do
usuário, com leis graus de liberdade. Para tornar ainda outras variáveis
constantes, nós podemos afirmar que os resultados são dependentes
das entradas pelo movimento da cabeça ou das mãos. Componentes
essenciais da configuração para usuários de desktop:
monitor estacionário e equipamento de entrada baseado em movimento
das mãos.
A experiência piloto - Pausch, 1993 - é aquela em que 28 usuários
procuram, de forma fácil, não camuflados, alvos de localizações
imprevisíveis numa sala virtual. Usuário de RV foram 42%
mais rápidos que usuários de desktop. Para encontrar, por
exemplo, o Y na figura
abaixo, que é uma tarefa de pré-atenção, independente
da camuflagem. Numa sala que envolve o usuário, o tempo de encontrar
o Y é
determinado apenas pela rapidez que posso mover a câmera. Mas, para
a mesma figura, o tempo de encontrar o K preto é uma tarefa relacionada
com tarefa mentalmente limitada, mesmo porque não existe o K. "Afirmamos
que os usuários de RV são muito melhores nas buscas sistemáticas
porque têm lembranças melhores daquilo que olharam na cena
que os envolve.
 Forma de condução dos trabalhos: usuários foram colocados
no centro de uma sala virtual de 4 metros de cada lado, que continha uma
porta e 2 janelas que serviram de ponto de orientação. Durante
as tarefas, a sal continha 170 letras arranjadas - ver figura 1. Cada letra
media em torno de 0,6 metros e era facilmente visível através
do display. As letras camufladas eram colocadas em posições
aleatórias. Quando o usuário a encontrava ele afirmava: "aqui
está!". 48 usuários participaram, 24 em cada modalidade.
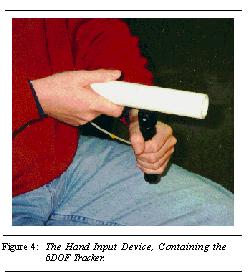
Os usuários de desktop controlavam seu ponto de vista através
de um controlador de câmera na mão - figura4, que continha
os mesmos 6 graus de liberdade usados pelos outros usuários. Cada
usuário tinha de encontrar 5 vezes. O gráfico abaixo - graph1
- permite análise de tempo de resposta para cada tipo de usuário.
Forma de condução dos trabalhos: usuários foram colocados
no centro de uma sala virtual de 4 metros de cada lado, que continha uma
porta e 2 janelas que serviram de ponto de orientação. Durante
as tarefas, a sal continha 170 letras arranjadas - ver figura 1. Cada letra
media em torno de 0,6 metros e era facilmente visível através
do display. As letras camufladas eram colocadas em posições
aleatórias. Quando o usuário a encontrava ele afirmava: "aqui
está!". 48 usuários participaram, 24 em cada modalidade.
Os usuários de desktop controlavam seu ponto de vista através
de um controlador de câmera na mão - figura4, que continha
os mesmos 6 graus de liberdade usados pelos outros usuários. Cada
usuário tinha de encontrar 5 vezes. O gráfico abaixo - graph1
- permite análise de tempo de resposta para cada tipo de usuário.
 RESULTADOS:
RESULTADOS:
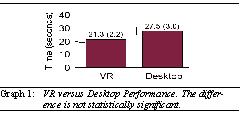 As diferenças entre os tempos de resposta são insignificantes
estatisticamente. A prática não aparece como um fator. Os
usuários foram questionados até que estivessem à vontade
para realizar a tarefa. Geralmente, o tempo gasto para encontrar a resposta
era de 15 minutos. Os usuários tinham entre 18 e 25 anos, muitos
sem prática de uso de equipamentos de RV.Os grupos foram balanceados
por idade. Além dos 48 usuários, 3 outros sofreram náuseas
e tiveram de parar.
Agora quando os alvos não estavam presentes, fez-se com que os usuários
executassem uma sequência de buscas, cada uma delas com 50% de chance
de se ter um alvo. Os usuários foram orientados para ou encontrar
o alvo ou afirmar que ele não estava presente. Desta forma, pode
se avaliar quanto tempo o usuário necessita para concluir a busca
na cena inteira.
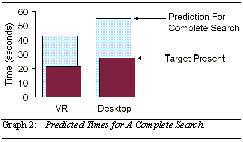
Quando os alvos são densos e os usuários experientes, podemos
predizer sobre o processo. Veja o gráfico 2:
As diferenças entre os tempos de resposta são insignificantes
estatisticamente. A prática não aparece como um fator. Os
usuários foram questionados até que estivessem à vontade
para realizar a tarefa. Geralmente, o tempo gasto para encontrar a resposta
era de 15 minutos. Os usuários tinham entre 18 e 25 anos, muitos
sem prática de uso de equipamentos de RV.Os grupos foram balanceados
por idade. Além dos 48 usuários, 3 outros sofreram náuseas
e tiveram de parar.
Agora quando os alvos não estavam presentes, fez-se com que os usuários
executassem uma sequência de buscas, cada uma delas com 50% de chance
de se ter um alvo. Os usuários foram orientados para ou encontrar
o alvo ou afirmar que ele não estava presente. Desta forma, pode
se avaliar quanto tempo o usuário necessita para concluir a busca
na cena inteira.
Quando os alvos são densos e os usuários experientes, podemos
predizer sobre o processo. Veja o gráfico 2:
 Veja o gráfico dos tempos de observação para a sala
toda e determinar que nenhuma letra está presente:
Veja o gráfico dos tempos de observação para a sala
toda e determinar que nenhuma letra está presente:
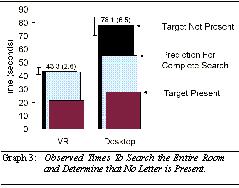 Os usuários de RV são somente 1,4% mais eficientes na predição.
Entretanto, usuários de desktop examinam porções da
sala num segundo tempo, como mostrado acima, tais usuários dispendem
41% mais tempo para ter uma busca concluida.
Os usuários de RV são somente 1,4% mais eficientes na predição.
Entretanto, usuários de desktop examinam porções da
sala num segundo tempo, como mostrado acima, tais usuários dispendem
41% mais tempo para ter uma busca concluida.
Implicações:
"A comunidade usuária de RV declara que a busca baseada no movimento
de cabeça, com controle egocêntrico de câmera, provê
um forte senso de imersão, em relação aos usuários
de desktop". Nossos resultados apresentam que RV pode auxiliar os usuários
a relembrarem.
Efeitos de transferência:
Uma outra análise importante foi efetuada: como se comportariam
os participantes que usaram RV no ambiente do tipo desktop. Neste caso,
pretendia se avaliar como os mesmos se comportariam, se haveria transferência
positiva - para tanto, 10 buscas foram propostas e depois mais 10 no novo
ambiente. Nos dois casos, haviam 5 alvos e 5 ausências de alvos.
O resultado pode ser visto no gráfico abaixo:
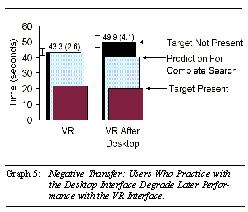
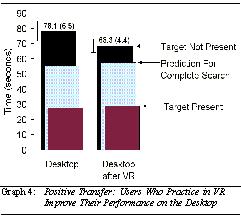 O resultado é significativo, estatisticamente. Foram feitos experimentos
reversos, de forma a analiasar o desempenho de usuários de desktop
no ambiente RV. O gráfico abaixo ilustra bem o problema de transferência
negativa de treinamento:
O resultado é significativo, estatisticamente. Foram feitos experimentos
reversos, de forma a analiasar o desempenho de usuários de desktop
no ambiente RV. O gráfico abaixo ilustra bem o problema de transferência
negativa de treinamento:
Conclusões:
Proponentes de RV afirma que isto pode melhorar o desempenho dos usuário,
por causa da imersão. Após comparada a performance de usuários
procurando alvos fortemente camuflados: metade dos usuários usando
RV e a outra metade usando display estacionário com visão
controlada pela mão, com 50% de casos contendo um alvo em posição
aleatória, conclui-se:
1- quando há alvos, RV não aumenta a performance. Talvez
porque trata-se de uma tarefa cognitiva limitada, e a habilidade de movimentação
de câmera não é importante;
2- quando não há alvos, RV são muito mais rápidos
que os demais. Acredita-se que tais usuários constroem um modelo
mental de referência de quadros para o espaço e evitam buscas
redundantes.
|